了解过之前老版本OpenCV的童鞋们都应该清楚,对于OpenCV1.0时代的基于C语言接口而建的图像存储格式IplImage*,如果在退出前忘记release掉的话,就会照成内存泄露.自从OpenCV踏入2.0时代,用Mat类数据结构作为主打之后,OpenCV变得越发像需要很少编程涵养的Matlab那样,上手超级快。甚至有些函数名称都和matlab一样,比如大家所熟知的imread,imwrite,imshow等函数。
mat类型
cv::Mat类是用于保存图像以及其他矩阵数据的数据结构。默认情况下,其尺寸为0,我们也可以指定初始尺寸,比如,比如定义一个Mat类对象,就要写cv::Mat pic(320,640,cv::Scalar(100));
Mat有多种创建方法,此处省略。
其他常用数据结构
- 二维点:Point2f
- 三维点: Point3f
- 点的表示:Point
- 颜色的表示:Scalar类
- 尺寸的表示:Size类
- 矩形的表示:Rect类
- 颜色空间转换:cvtColor
基本图形的绘制
画椭圆
void DrawEllipse( Mat img, double angle )
{
int thickness = 2;
int lineType = 8;
ellipse( img,
Point( WINDOW_WIDTH/2, WINDOW_WIDTH/2 ),
Size( WINDOW_WIDTH/4, WINDOW_WIDTH/16 ),
angle,
0,
360,
Scalar( 255, 129, 0 ),
thickness,
lineType );
}
画圆
void DrawFilledCircle( Mat img, Point center )
{
int thickness = -1;
int lineType = 8;
circle( img,
center,
WINDOW_WIDTH/32,
Scalar( 0, 0, 255 ),
thickness,
lineType );
}
画多边形
void DrawPolygon( Mat img )
{
int lineType = 8;
//创建一些点
Point rookPoints[1][20];
rookPoints[0][0] = Point( WINDOW_WIDTH/4, 7*WINDOW_WIDTH/8 );
rookPoints[0][1] = Point( 3*WINDOW_WIDTH/4, 7*WINDOW_WIDTH/8 );
rookPoints[0][2] = Point( 3*WINDOW_WIDTH/4, 13*WINDOW_WIDTH/16 );
rookPoints[0][3] = Point( 11*WINDOW_WIDTH/16, 13*WINDOW_WIDTH/16 );
rookPoints[0][4] = Point( 19*WINDOW_WIDTH/32, 3*WINDOW_WIDTH/8 );
rookPoints[0][5] = Point( 3*WINDOW_WIDTH/4, 3*WINDOW_WIDTH/8 );
rookPoints[0][6] = Point( 3*WINDOW_WIDTH/4, WINDOW_WIDTH/8 );
rookPoints[0][7] = Point( 26*WINDOW_WIDTH/40, WINDOW_WIDTH/8 );
rookPoints[0][8] = Point( 26*WINDOW_WIDTH/40, WINDOW_WIDTH/4 );
rookPoints[0][9] = Point( 22*WINDOW_WIDTH/40, WINDOW_WIDTH/4 );
rookPoints[0][10] = Point( 22*WINDOW_WIDTH/40, WINDOW_WIDTH/8 );
rookPoints[0][11] = Point( 18*WINDOW_WIDTH/40, WINDOW_WIDTH/8 );
rookPoints[0][12] = Point( 18*WINDOW_WIDTH/40, WINDOW_WIDTH/4 );
rookPoints[0][13] = Point( 14*WINDOW_WIDTH/40, WINDOW_WIDTH/4 );
rookPoints[0][14] = Point( 14*WINDOW_WIDTH/40, WINDOW_WIDTH/8 );
rookPoints[0][15] = Point( WINDOW_WIDTH/4, WINDOW_WIDTH/8 );
rookPoints[0][16] = Point( WINDOW_WIDTH/4, 3*WINDOW_WIDTH/8 );
rookPoints[0][17] = Point( 13*WINDOW_WIDTH/32, 3*WINDOW_WIDTH/8 );
rookPoints[0][18] = Point( 5*WINDOW_WIDTH/16, 13*WINDOW_WIDTH/16 );
rookPoints[0][19] = Point( WINDOW_WIDTH/4, 13*WINDOW_WIDTH/16 );
const Point* ppt[1] = { rookPoints[0] };
int npt[] = { 20 };
fillPoly( img,
ppt,
npt,
1,
Scalar( 255, 255, 255 ),
lineType );
}
画线
void DrawLine( Mat img, Point start, Point end )
{
int thickness = 2;
int lineType = 8;
line( img,
start,
end,
Scalar( 0, 0, 0 ),
thickness,
lineType );
}
用指针访问像素
void colorReduce(Mat& inputImage, Mat& outputImage, int div)
{
//参数准备
outputImage = inputImage.clone(); //拷贝实参到临时变量
int rowNumber = outputImage.rows; //行数
int colNumber = outputImage.cols*outputImage.channels(); //列数 x 通道数=每一行元素的个数
//双重循环,遍历所有的像素值
for(int i = 0;i < rowNumber;i++) //行循环
{
uchar* data = outputImage.ptr<uchar>(i); //获取第i行的首地址
for(int j = 0;j < colNumber;j++) //列循环
{
// ---------【开始处理每个像素】-------------
data[j] = data[j]/div*div + div/2;
// ----------【处理结束】---------------------
} //行处理结束
}
}
用迭代器访问像素
void colorReduce(Mat& inputImage, Mat& outputImage, int div)
{
//参数准备
outputImage = inputImage.clone(); //拷贝实参到临时变量
//获取迭代器
Mat_<Vec3b>::iterator it = outputImage.begin<Vec3b>(); //初始位置的迭代器
Mat_<Vec3b>::iterator itend = outputImage.end<Vec3b>(); //终止位置的迭代器
//存取彩色图像像素
for(;it != itend;++it)
{
// ------------------------【开始处理每个像素】--------------------
(*it)[0] = (*it)[0]/div*div + div/2;
(*it)[1] = (*it)[1]/div*div + div/2;
(*it)[2] = (*it)[2]/div*div + div/2;
// ------------------------【处理结束】----------------------------
}
}
用动态地址计算配合at访问像素
void colorReduce(Mat& inputImage, Mat& outputImage, int div)
{
//参数准备
outputImage = inputImage.clone(); //拷贝实参到临时变量
int rowNumber = outputImage.rows; //行数
int colNumber = outputImage.cols; //列数
//存取彩色图像像素
for(int i = 0;i < rowNumber;i++)
{
for(int j = 0;j < colNumber;j++)
{
// ------------------------【开始处理每个像素】--------------------
outputImage.at<Vec3b>(i,j)[0] = outputImage.at<Vec3b>(i,j)[0]/div*div + div/2; //蓝色通道
outputImage.at<Vec3b>(i,j)[1] = outputImage.at<Vec3b>(i,j)[1]/div*div + div/2; //绿色通道
outputImage.at<Vec3b>(i,j)[2] = outputImage.at<Vec3b>(i,j)[2]/div*div + div/2; //红是通道
// -------------------------【处理结束】----------------------------
} // 行处理结束
}
}
注意:opencv中的彩色图像不是按rgb顺序排列的,而是bgr。
ROI与图像混合
定义ROI感兴趣区域有两种方法:
//方法一
imageROI=image(Rect(500,250,logo.cols,logo.rows));
//方法二
imageROI=srcImage3(Range(250,250+logoImage.rows),Range(200,200+logoImage.cols));
线性混合
线性混合操作是一种典型的二元(两个输入)的像素操作,它的理论公式是这样的:
\(g(x)=(1-a)f_a(x)+af_3(x)\)
我们通过在范围0到1之间改变alpha值,来对两幅图像(f0(x)和f1(x))或两段视频(同样为(f0(x)和f1(x))产生时间上的画面叠化(cross-dissolve)效果,就像幻灯片放映和电影制作中的那样。即在幻灯片翻页时设置的前后页缓慢过渡叠加效果,以及电影情节过渡时经常出现的画面叠加效果。
实现方面,我们主要运用了OpenCV中addWeighted函数.
bool LinearBlending()
{
//【0】定义一些局部变量
double alphaValue = 0.5;
double betaValue;
Mat srcImage2, srcImage3, dstImage;
// 【1】读取图像 ( 两幅图片需为同样的类型和尺寸 )
srcImage2 = imread("mogu.jpg");
srcImage3 = imread("rain.jpg");
if( !srcImage2.data ) { printf("读取srcImage2错误! \n"); return false; }
if( !srcImage3.data ) { printf("读取srcImage3错误! \n"); return false; }
// 【2】进行图像混合加权操作
betaValue = ( 1.0 - alphaValue );
addWeighted( srcImage2, alphaValue, srcImage3, betaValue, 0.0, dstImage);
// 【3】显示原图窗口
imshow( "<2>线性混合示例窗口【原图】", srcImage2 );
imshow( "<3>线性混合示例窗口【效果图】", dstImage );
return true;
}
分离颜色通道,多通道颜色混合
通道分离split函数
//【2】将一个三通道图像转换成三个单通道图像
split(srcImage,channels);//分离色彩通道
//【3】将原图的红色通道引用返回给imageBlueChannel,注意是引用,相当于两者等价,修改其中一个另一个跟着变
imageRedChannel= channels.at(2);
通道合并,merge函数
merge是split的逆向操作,是把多个通道合并
//【5】将三个单通道重新合并成一个三通道
merge(channels,srcImage);
图像对比度、亮度值调整
static void ContrastAndBright(int, void *)
{
// 创建窗口
namedWindow("【原始图窗口】", 1);
// 三个for循环,执行运算 g_dstImage(i,j) = a*g_srcImage(i,j) + b
for( int y = 0; y < g_srcImage.rows; y++ )
{
for( int x = 0; x < g_srcImage.cols; x++ )
{
for( int c = 0; c < 3; c++ )
{
g_dstImage.at<Vec3b>(y,x)[c] = saturate_cast<uchar>( (g_nContrastValue*0.01)*( g_srcImage.at<Vec3b>(y,x)[c] ) + g_nBrightValue );
}
}
}
// 显示图像
imshow("【原始图窗口】", g_srcImage);
imshow("【效果图窗口】", g_dstImage);
}

离散傅立叶变换
 dft函数用于对一维或二维浮点数组进行正向或反向傅立叶变换。
dft函数用于对一维或二维浮点数组进行正向或反向傅立叶变换。
getOptimalDFTSize返回dft最优尺寸
copyMakeBorder扩充图片边界
magnitude计算二维矢量的幅值
normalize矩阵归一化
主要步骤如下
【1】以灰度模式读取原始图像并显示
2】将输入图像延扩到最佳的尺寸,边界用0补充
3】为傅立叶变换的结果(实部和虚部)分配存储空间
4】进行就地离散傅里叶变换
【5】将复数转换为幅值,即=> log(1 + sqrt(Re(DFT(I))^2 + Im(DFT(I))^2))
6】进行对数尺度(logarithmic scale)缩放
【7】剪切和重分布幅度图象限
【8】归一化,用0到1之间的浮点值将矩阵变换为可视的图像格式
【9】显示效果图
int main( )
{
//【1】以灰度模式读取原始图像并显示
Mat srcImage = imread("1.jpg", 0);
if(!srcImage.data ) { printf("读取图片错误,请确定目录下是否有imread函数指定图片存在~! \n"); return false; }
imshow("原始图像" , srcImage);
ShowHelpText();
//【2】将输入图像延扩到最佳的尺寸,边界用0补充
int m = getOptimalDFTSize( srcImage.rows );
int n = getOptimalDFTSize( srcImage.cols );
//将添加的像素初始化为0.
Mat padded;
copyMakeBorder(srcImage, padded, 0, m - srcImage.rows, 0, n - srcImage.cols, BORDER_CONSTANT, Scalar::all(0));
//【3】为傅立叶变换的结果(实部和虚部)分配存储空间。
//将planes数组组合合并成一个多通道的数组complexI
Mat planes[] = {Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F)};
Mat complexI;
merge(planes, 2, complexI);
//【4】进行就地离散傅里叶变换
dft(complexI, complexI);
//【5】将复数转换为幅值,即=> log(1 + sqrt(Re(DFT(I))^2 + Im(DFT(I))^2))
split(complexI, planes); // 将多通道数组complexI分离成几个单通道数组,planes[0] = Re(DFT(I), planes[1] = Im(DFT(I))
magnitude(planes[0], planes[1], planes[0]);// planes[0] = magnitude
Mat magnitudeImage = planes[0];
//【6】进行对数尺度(logarithmic scale)缩放
magnitudeImage += Scalar::all(1);
log(magnitudeImage, magnitudeImage);//求自然对数
//【7】剪切和重分布幅度图象限
//若有奇数行或奇数列,进行频谱裁剪
magnitudeImage = magnitudeImage(Rect(0, 0, magnitudeImage.cols & -2, magnitudeImage.rows & -2));
//重新排列傅立叶图像中的象限,使得原点位于图像中心
int cx = magnitudeImage.cols/2;
int cy = magnitudeImage.rows/2;
Mat q0(magnitudeImage, Rect(0, 0, cx, cy)); // ROI区域的左上
Mat q1(magnitudeImage, Rect(cx, 0, cx, cy)); // ROI区域的右上
Mat q2(magnitudeImage, Rect(0, cy, cx, cy)); // ROI区域的左下
Mat q3(magnitudeImage, Rect(cx, cy, cx, cy)); // ROI区域的右下
//交换象限(左上与右下进行交换)
Mat tmp;
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
//交换象限(右上与左下进行交换)
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
//【8】归一化,用0到1之间的浮点值将矩阵变换为可视的图像格式
//此句代码的OpenCV2版为:
//normalize(magnitudeImage, magnitudeImage, 0, 1, CV_MINMAX);
//此句代码的OpenCV3版为:
normalize(magnitudeImage, magnitudeImage, 0, 1, NORM_MINMAX);
//【9】显示效果图
imshow("频谱幅值", magnitudeImage);
waitKey();
return 0;
}
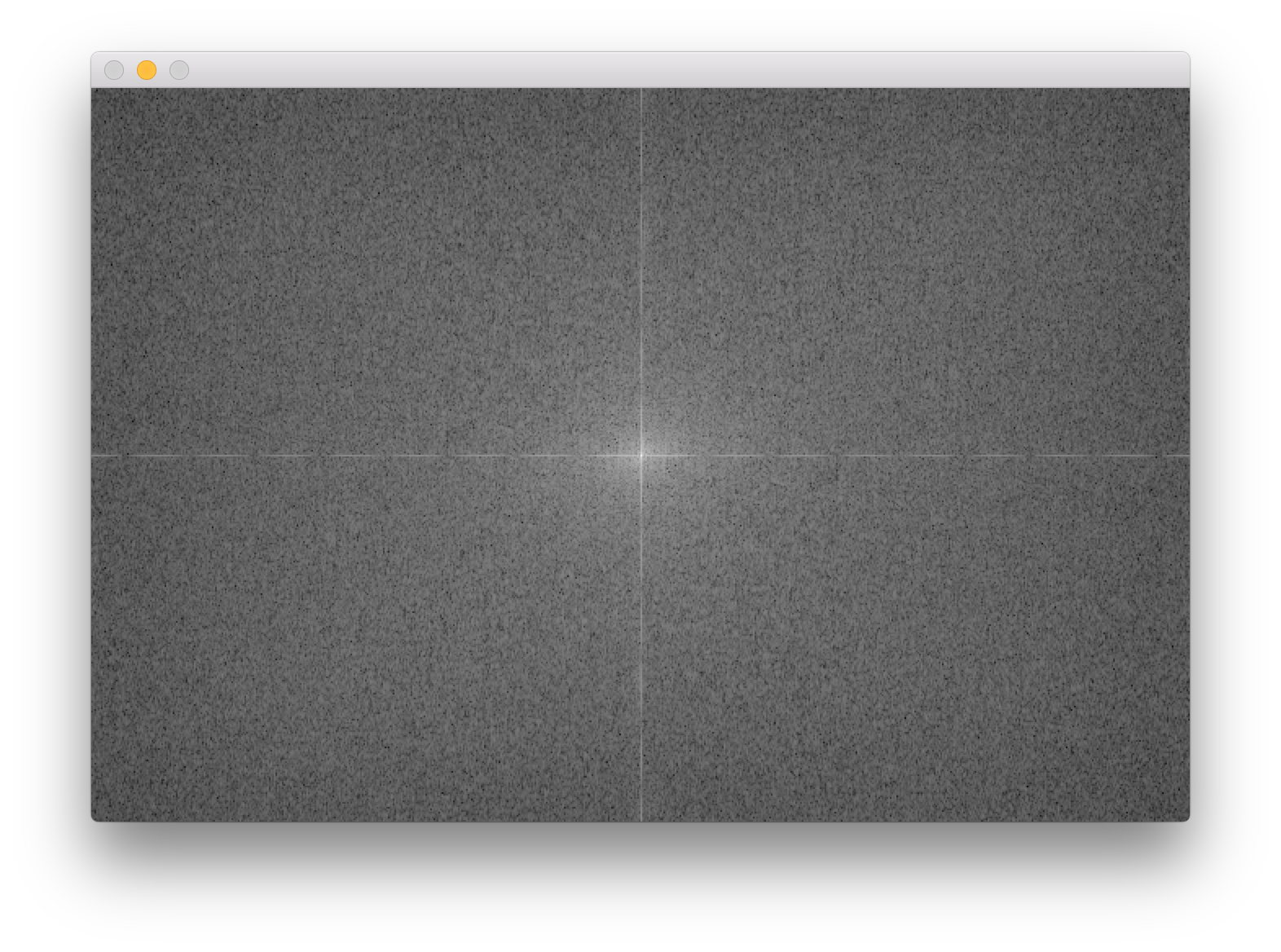
傅立叶变换结果
输入输出xml与yaml文件
一般步骤如下:
1.实例化FileStorage类对象,完成初始化。
2.使用流操作符《写入,》读取。
3.析构FileStorage对象,同时关闭文件。
XML和YAML文件的写入
int main( )
{
//改变console字体颜色
system("color 5F");
ShowHelpText();
//初始化
FileStorage fs("test.yaml", FileStorage::WRITE);
//开始文件写入
fs << "frameCount" << 5;
time_t rawtime; time(&rawtime);
fs << "calibrationDate" << asctime(localtime(&rawtime));
Mat cameraMatrix = (Mat_<double>(3,3) << 1000, 0, 320, 0, 1000, 240, 0, 0, 1);
Mat distCoeffs = (Mat_<double>(5,1) << 0.1, 0.01, -0.001, 0, 0);
fs << "cameraMatrix" << cameraMatrix << "distCoeffs" << distCoeffs;
fs << "features" << "[";
for( int i = 0; i < 3; i++ )
{
int x = rand() % 640;
int y = rand() % 480;
uchar lbp = rand() % 256;
fs << "{:" << "x" << x << "y" << y << "lbp" << "[:";
for( int j = 0; j < 8; j++ )
fs << ((lbp >> j) & 1);
fs << "]" << "}";
}
fs << "]";
fs.release();
printf("\n文件读写完毕,请在工程目录下查看生成的文件~");
getchar();
return 0;
}
XML和YAML文件的读取
int main( )
{
//改变console字体颜色
system("color 6F");
ShowHelpText();
//初始化
FileStorage fs2("test.yaml", FileStorage::READ);
// 第一种方法,对FileNode操作
int frameCount = (int)fs2["frameCount"];
std::string date;
// 第二种方法,使用FileNode运算符> >
fs2["calibrationDate"] >> date;
Mat cameraMatrix2, distCoeffs2;
fs2["cameraMatrix"] >> cameraMatrix2;
fs2["distCoeffs"] >> distCoeffs2;
cout << "frameCount: " << frameCount << endl
<< "calibration date: " << date << endl
<< "camera matrix: " << cameraMatrix2 << endl
<< "distortion coeffs: " << distCoeffs2 << endl;
FileNode features = fs2["features"];
FileNodeIterator it = features.begin(), it_end = features.end();
int idx = 0;
std::vector<uchar> lbpval;
//使用FileNodeIterator遍历序列
for( ; it != it_end; ++it, idx++ )
{
cout << "feature #" << idx << ": ";
cout << "x=" << (int)(*it)["x"] << ", y=" << (int)(*it)["y"] << ", lbp: (";
// 我们也可以使用使用filenode > > std::vector操作符很容易的读数值阵列
(*it)["lbp"] >> lbpval;
for( int i = 0; i < (int)lbpval.size(); i++ )
cout << " " << (int)lbpval[i];
cout << ")" << endl;
}
fs2.release();
//程序结束,输出一些帮助文字
printf("\n文件读取完毕,请输入任意键结束程序~");
getchar();
return 0;
}